Resolución de sistemas lineales
Contenidos
Introducción
Queremos resolver sistemas de ecuaciones lineales con el mismo número de ecuaciones que de incógnitas con matriz de coeficientes no singular.
Dados los números \(a_{ij}\) y \(b_{j}\) para \(i,j=1,2,\ldots,n\) se trata de hallar los números \(x_{1},x_{2},\ldots,x_{n}\) que verifican las \(n\) ecuaciones lineales \[ \begin{array}{cll} a_{11}x_{1}+a_{12}x_{2}+\ldots+a_{1n}x_{n} & = & b_{1}\\ a_{21}x_{1}+a_{22}x_{2}+\ldots+a_{2n}x_{n} & = & b_{2}\\ \vdots\\ a_{n1}x_{1}+a_{n2}x_{2}+\ldots+a_{nn}x_{n} & = & b_{n} \end{array} \]
Métodos iterativos
Los métodos iterativos son, en general, más eficientes que los métodos directos para resolver sistemas de ecuaciones lineales grandes y con matrices de coeficientes con pocos elementos distintos de cero.
Los métodos iterativos se basan en reescribir el problema \[ A\mathbf{x}=\mathbf{b}\Longleftrightarrow\mathbf{x}=B\mathbf{x}+\mathbf{c} \] donde \(B\) es una matriz \(n\times n\) y \(c\) es un vector columna de dimensión \(n\)
Entonces, si \(\mathbf{x}^{(0)}\) es una aproximación inicial a la solución, para \(k=1,2,\ldots\) \[ \mathbf{x}^{(k)}=B\mathbf{x}^{(k-1)}+\mathbf{c} \]
JACOBI
Algoritmo de Jacobi
- Elegir una aproximación inicial \(\mathbf{x}^{(0)}\)
- Para \(k=1,2,\ldots,MaxIter\)
- ----Para \(i=1,2,\ldots,n\) calcular \[ x_{i}^{(k)}=\frac{1}{a_{ii}}(b_{i}-\sum_{j=1}^{i-1}a_{ij}x_{j}^{(k-1)}-\sum_{j=i+1}^{n}a_{ij}x_{j}^{(k-1)}) \]
- ----Si se cumple el criterio de parada, tomar \(\mathbf{x}^{(k)}\) como aproximación a la solución.
Ejercicio 1. Crear una función [x,n]=jacobi(A,b,tol) que solucione el sistema lineal \(Ax=b\) por el método de Jacobi. \(x\) es la solución del sistema y \(n\) el número de iteraciones realizadas.
Resolver el sistema \[ \begin{cases} 5x_{1}+x_{2}-x_{3}-x_{4} & =1\\ x_{1}+4x_{2}-x_{3}+x_{4} & =1\\ x_{1}+x_{2}-5x_{3}-x_{4} & =1\\ x_{1}+x_{2}+x_{3}-4x_{4} & =1 \end{cases} \] por el método de Jacobi, con tolerancia absoluta \(10^{-4}\). Usar la norma infinito \[ \lvert\lvert\mathrm{x}^{\left(k\right)}-\mathrm{x}^{\left(k-1\right)}\rvert\rvert_{\infty}=\underset{1\leq i\leq n}{\max}\left(\left|x_{i}^{(k)}-x_{i}^{(k-1)}\right|\right) \]
A=[ 5 1 -1 -1; 1 4 -1 1 ; 1 1 -5 -1; 1 1 1 -4]; b=[1;1;1;1]; tol=1e-4; [x,n]=jacobi(A,b,tol)
x =
0.0937
0.2500
-0.0937
-0.1875
n =
12
Resolver también el sistema \(A_1x=b_1\)
m=30; A1=magic(m); for i=1:m,A1(i,i)=norm(A1,inf);end b1=A1*(m:-1:1)'; tol=1e-4; [x,n]=jacobi(A1,b1,tol); sol=x' iteraciones=n
sol =
Columns 1 through 7
30.0000 29.0000 28.0000 27.0000 26.0000 25.0000 24.0000
Columns 8 through 14
23.0000 22.0000 21.0000 20.0000 19.0000 18.0000 17.0000
Columns 15 through 21
16.0000 15.0000 14.0000 13.0000 12.0000 11.0000 10.0000
Columns 22 through 28
9.0000 8.0000 7.0000 6.0000 5.0000 4.0000 3.0000
Columns 29 through 30
2.0000 1.0000
iteraciones =
9
GAUSS-SEIDEL
Algoritmo de Gauss-Seidel
- Elegir una aproximación inicial \(\mathbf{x}^{(0)}\)
- Para \(k=1,2,\ldots,MaxIter\)
- ----Para \(i=1,2,\ldots,n\) calcular \[ x_{i}^{(k)}=\frac{1}{a_{ii}}(b_{i}-\sum_{j=1}^{i-1}a_{ij}x_{j}^{(k)}-\sum_{j=i+1}^{n}a_{ij}x_{j}^{(k-1)}) \]
- ----Si se cumple el criterio de parada, tomar \(\mathbf{x}^{(k)}\) como aproximación a la solución.
Ejercicio 2. Crear una función [x,n]=gauss_seidel(A,b,tol) que solucione el sistema lineal \(Ax=b\) por el método de Gauss-Seidel. Resolver el sistema anterior
[x,n]=gauss_seidel(A,b,tol)
x =
0.0938
0.2500
-0.0937
-0.1875
n =
6
Resolver también el sistema \(A_1x=b_1\)
m=30; A1=magic(m); for i=1:m,A1(i,i)=norm(A1,inf);end b1=A1*(m:-1:1)'; tol=1e-4; [x,n]=gauss_seidel(A1,b1,tol); sol=x' iteraciones=n
sol =
Columns 1 through 7
30.0000 29.0000 28.0000 27.0000 26.0000 25.0000 24.0000
Columns 8 through 14
23.0000 22.0000 21.0000 20.0000 19.0000 18.0000 17.0000
Columns 15 through 21
16.0000 15.0000 14.0000 13.0000 12.0000 11.0000 10.0000
Columns 22 through 28
9.0000 8.0000 7.0000 6.0000 5.0000 4.0000 3.0000
Columns 29 through 30
2.0000 1.0000
iteraciones =
5
Ejercicio 3. Modificar las funciones anteriores y llamarlas jacobi2 y gauss_seidel2, de forma que devuelvan la sucesión de soluciones y la sucesión de errores relativos. Utilizarlas para:
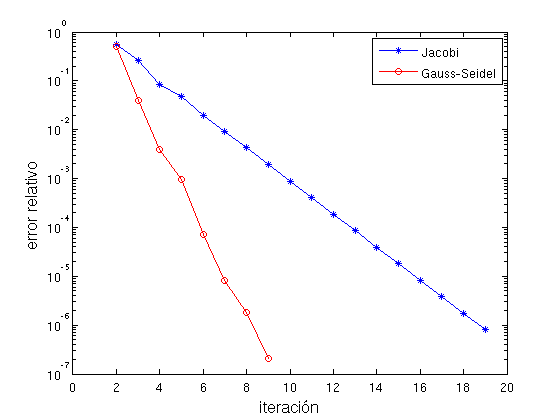
- Dibujar la sucesión de errores relativos en escala logarímica (usar semilogy en lugar de plot) al resolver el sistema anterior por Jacobi y Gauss-Seidel para una tolerancia relativa \(10^{-6}\).
Ejercicio3a
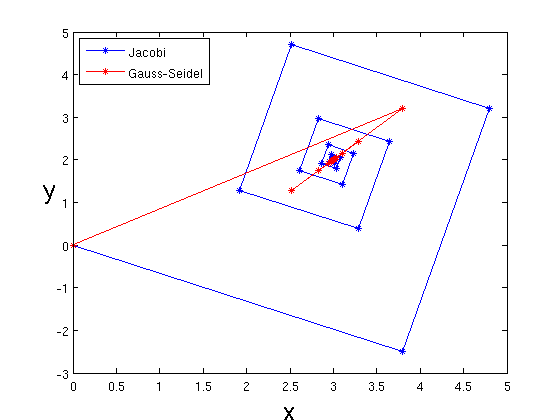
- Resolver por Jacobi y Gauss-Seidel el sistema \[ \begin{cases} 5x+2y & =19\\ 3x-2y & =5 \end{cases} \] con tolerancia relativa \(10^{-2}\) y dibujar las sucesivas soluciones en el plano XY.
Ejercicio3b
Métodos directos
FACTORIZACIÓN LU
Descomponemos la matriz de coeficientes \(A\) en una matriz triangular superior \(U\) y una matriz triangular inferior \(L\) de forma que \[ A=LU \] Consideramos el sistema de ecuaciones lineales \[ A\mathbf{x}=\mathbf{b} \] donde la matriz \(A\) admite la factorización \(LU\). Entonces \[ A\mathbf{x}=\mathbf{b}\Longleftrightarrow LU\mathbf{x}=\mathbf{b} \] Factorizaremos la matriz \(A\) usando la orden de Matlab lu
A=[2 1 1;1 2 -1;-1 1 2]; [L U P]=lu(A)
L =
1.0000 0 0
0.5000 1.0000 0
-0.5000 1.0000 1.0000
U =
2.0000 1.0000 1.0000
0 1.5000 -1.5000
0 0 4.0000
P =
1 0 0
0 1 0
0 0 1
Si la función lu reordena las filas se verifica que \(PA=LU\) y estaremos resolviendo \(PAx=Pb\) que es equivalente al sistema \(Ax=b\).
Para resolver el sistema
- resolvemos \(L\mathbf{y}=P\mathbf{b}\) usando sustitución progresiva y obtenemos \(\mathbf{y}\).
- resolvemos \(U\mathbf{x}=\mathbf{y}\) usando sustitución regresiva y obtenemos \(\mathbf{x}\).
ALGORITMO DE SUSTITUCIÓN PROGRESIVA
Si tenemos un sistema \[ L\mathbf{x}=\mathbf{b} \] donde \(L\) es una matriz triangular inferior:
\[ L=\left(\begin{array}{ccccc} l_{11} & 0 & 0 & \ldots & 0\\ l_{21} & l_{22} & 0 & \ldots & 0\\ l_{31} & l_{32} & l_{33} & \ldots & 0\\ \vdots & \vdots & \vdots & \ddots & \vdots\\ l_{n1} & l_{n2} & l_{n3} & \ldots & l_{nn} \end{array}\right) \] La ecuación \(i\)-ésima del sistema, para \(i=1,2,\ldots,n\) es: \[ l_{i1}x_{1}+l_{i2}x_{2}+\cdots+l_{ii}x_{i}=b_{i} \]
Por lo tanto, para \(i=1,2,\ldots,n\), si \(l_{ii}\) no es \(0\) entonces \[ x_{i}=\frac{b_{i}-l_{i1}x_{1}-\cdots-l_{ii-1}x_{i-1}}{l_{ii}}=\frac{1}{l_{ii}}\left(b_{i}-\sum_{j=1}^{i-1}l_{ij}x_{j}\right) \]
Algoritmo
- Si \(l_{11}=0\), parar (no existe solución única).
- Hacer \(x_{1}=\frac{b_{1}}{l_{11}}\)
- Para \(i=2,\ldots,n\)
- -----Si \(l_{ii}=0\), parar (no tiene solución)
- -----Hacer \[ x_{i}=\frac{1}{l_{ii}}\left(b_{i}-\sum_{j=1}^{i-1}l_{ij}x_{j}\right) \]
Ejercicio 4. Construir una función x=sust_pro(L,b) donde x es la solución del sistema Lx=b siendo L es una matriz triangular inferior. Resolver el sistema \[\left(\begin{array}{rrr} 2 & 0 & 0\\ 1 & 2 & 0\\ 1 & 1 & 2 \end{array}\right) \left(\begin{array}{c} x_1\\ x_2\\ x_3 \end{array}\right)= \left(\begin{array}{r} 2\\ -1\\ 0 \end{array}\right) \]
L=[2 0 0;1 2 0;1 1 2]; b=[2 -1 0]; x=sust_pro(L,b')
x =
1
-1
0
ALGORITMO DE SUSTITUCIÓN REGRESIVA
Si tenemos un sistema \[ U\mathbf{x}=\mathbf{b}' \] donde \(U\) es una matriz triangular superior: \[ U=\left(\begin{array}{ccccc} u_{11} & u_{12} & u_{13} & \ldots & u_{1n}\\ 0 & u_{22} & u_{23} & \ldots & u_{2n}\\ 0 & 0 & u_{33} & \ldots & u_{3n}\\ \vdots & \vdots & \vdots & \ddots & \vdots\\ 0 & 0 & 0 & 0 & u_{nn} \end{array}\right) \] La ecuación \(i\)-ésima del sistema, para \(i=1,2,\ldots,n\) es: \[ u_{ii}x_{i}+u_{ii+1}x_{i+1}+\cdots+u_{in}x_{n}=b_{i} \] Por lo tanto, para \(i=n,n-1,\ldots,1\), si \(u_{ii}\) no es \(0\) entonces \[ x_{i}=\frac{b_{i}-u_{ii+1}x_{i+1}-\cdots-u_{in}x_{n}}{u_{ii}}=\frac{1}{u_{ii}}\left(b_{i}-\sum_{j=i+1}^{n}u_{ij}x_{j}\right) \]
Algoritmo
- Si \(u_{nn}=0\), parar (no existe solución única).
- Hacer \(x_{n}=\frac{b_{n}}{u_{nn}}\)
- Para \(i=n-1,\ldots,1\)
- ---- Si \(u_{ii}=0\), parar (no tiene solución)
- ---- Hacer \[ x_{i}=\frac{1}{u_{ii}}\left(b_{i}-\sum_{j=i+1}^{n}u_{ij}x_{j}\right) \]
Ejercicio 5. Construir una función x=sust_re(U,b) donde x es la solución del sistema Ux=b siendo U es una matriz triangular superior. Resolver el sistema \[\left(\begin{array}{rrr} 2 & 1 & 1\\ 0 & 2 & 1\\ 0 & 0 & 2 \end{array}\right) \left(\begin{array}{c} x_1\\ x_2\\ x_3 \end{array}\right)= \left(\begin{array}{r} 9\\ 4\\ 4 \end{array}\right) \]
U=[2 1 1;0 2 1;0 0 2]; b=[9 4 4]; x=sust_re(U,b')
x =
3
1
2
Ejercicio 6. Dado el sistema \(Ax=b\) con \[ A=\left(\begin{array}{rrr} 2 & 1 & 1\\ 1 & 2 & 2\\ 1 & 1 & 2 \end{array}\right)\quad b=\left(\begin{array}{c} 2\\ 4\\ 6 \end{array}\right) \] Resolverlo utilizando la descomposición LU.
Ejercicio6
L =
1.0000 0 0
0.5000 1.0000 0
0.5000 0.3333 1.0000
U =
2.0000 1.0000 1.0000
0 1.5000 1.5000
0 0 1.0000
P =
1 0 0
0 1 0
0 0 1
b1 =
2
4
6
y =
2
3
4
x =
0
-2
4
La operación \
Ejercicio
Resolver el sistema \(Ax=b) utilizando el operador \.
A=[ 5 1 -1 -1; 1 4 -1 1 ; 1 1 -5 -1; 1 1 1 -4]; b=[1;1;1;1]; x=A\b
x =
0.0937
0.2500
-0.0938
-0.1875